

Los sistemas de control del sistema nervioso representan uno de los ejemplos más sofisticados de regulación biológica conocidos. Aunque muchos procesos fisiológicos utilizan mecanismos clásicos de retroalimentación negativa, gran parte del control motor y conductual depende de mecanismos mucho más complejos capaces de anticipar eventos futuros, corregir errores antes de que produzcan consecuencias importantes y modificar progresivamente su desempeño mediante aprendizaje. Entre estos mecanismos destacan el control anterógrado y el control adaptativo, ambos fundamentales para la coordinación motora rápida, precisa y eficiente.
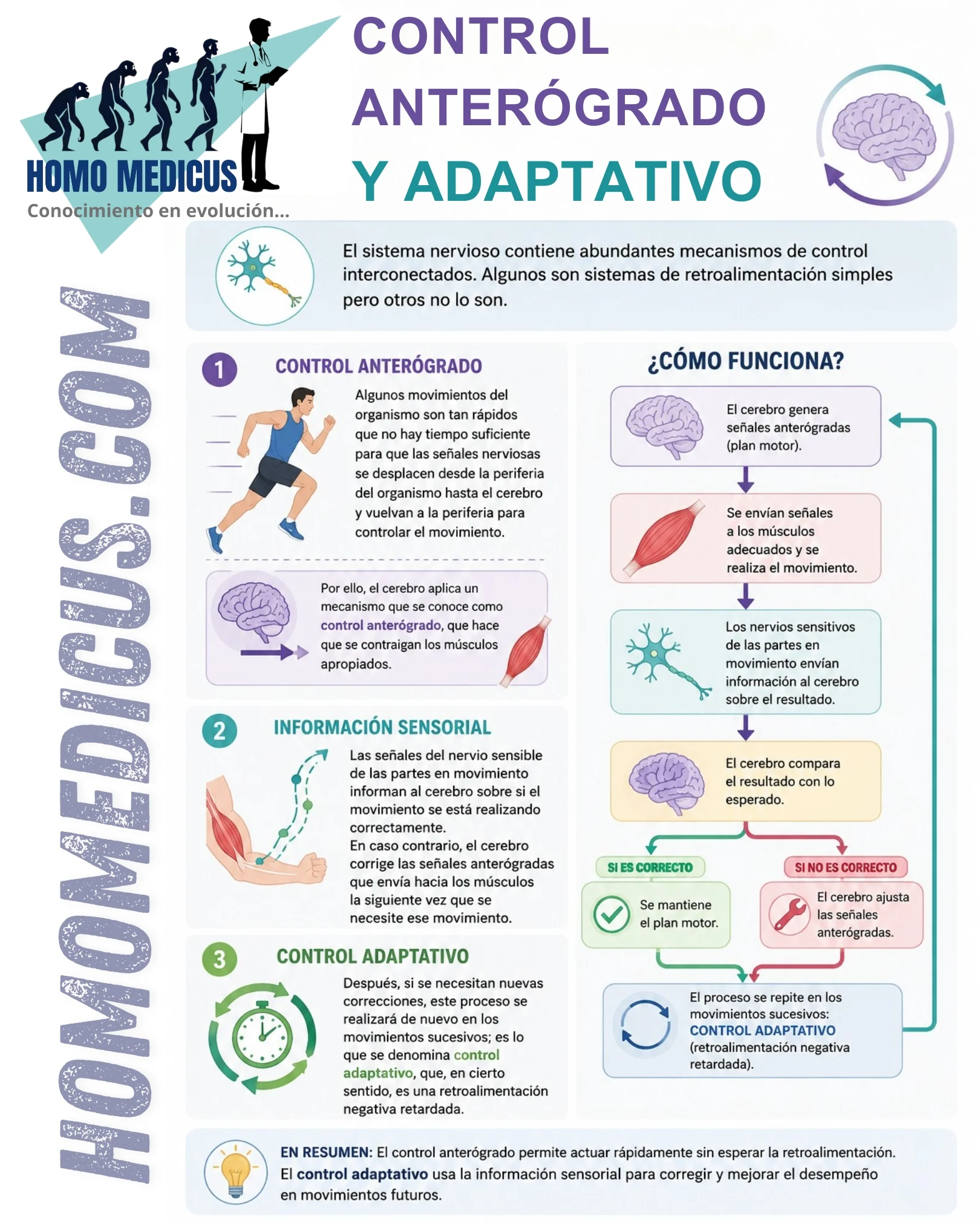
El control anterógrado, también denominado control feedforward, consiste en la generación anticipatoria de comandos motores antes de que exista retroalimentación sensorial suficiente para corregir el movimiento en tiempo real. Este mecanismo es indispensable porque muchas acciones motoras ocurren a velocidades incompatibles con los tiempos de conducción nerviosa requeridos para establecer un circuito completo de retroalimentación desde la periferia hacia el encéfalo y nuevamente hacia los músculos. Durante movimientos rápidos, como escribir en un teclado, tocar un instrumento musical, lanzar un objeto o articular palabras durante el habla, el sistema nervioso no puede esperar a recibir información sensorial correctiva antes de ejecutar cada contracción muscular. En consecuencia, el encéfalo debe predecir de manera anticipada cuáles músculos deben activarse, con qué intensidad y en qué secuencia temporal precisa.
La necesidad fisiológica de este mecanismo surge principalmente de las limitaciones temporales inherentes al sistema nervioso. Aunque algunas fibras nerviosas poseen velocidades de conducción extremadamente altas, cercanas a 120 m/s, incluso estos valores resultan insuficientes para controlar movimientos balísticos extremadamente rápidos mediante retroalimentación instantánea. Cuando un individuo realiza un movimiento súbito de los dedos, la acción completa puede finalizar antes de que la información sensitiva relacionada con la posición exacta del miembro alcance el cerebelo y retorne a la corteza motora para corregir el movimiento. Por esta razón, el sistema nervioso central desarrolla programas motores predictivos capaces de ejecutar acciones completas utilizando información previamente aprendida sobre las propiedades mecánicas del cuerpo y del entorno.
El cerebelo constituye la principal estructura neuroanatómica relacionada con este tipo de control predictivo. Esta región encefálica posee una arquitectura neuronal predominantemente anterógrada, caracterizada por transmisión unidireccional de señales desde las aferencias hacia las neuronas de salida, con muy poca recurrencia interna. Esta organización favorece respuestas extremadamente rápidas y precisas, minimizando retrasos asociados con circuitos reverberantes complejos. En contraste con la corteza cerebral, el cerebelo no está diseñado para mantener actividad autosostenida prolongada, sino para transformar información sensorial y motora en comandos correctivos inmediatos y altamente temporizados.
El funcionamiento del control anterógrado depende de la generación de modelos internos neuronales. Un modelo interno es una representación funcional que el sistema nervioso construye acerca de las propiedades dinámicas del cuerpo y del ambiente. Mediante estos modelos, el cerebro puede predecir las consecuencias futuras de una orden motora antes de que el movimiento ocurra realmente. Así, cuando la corteza motora emite una señal destinada a contraer ciertos músculos, simultáneamente se genera una “copia eferente” de dicha orden que es enviada al cerebelo. El cerebelo utiliza esta información para estimar cuál será la posición futura del cuerpo y ajustar anticipadamente la actividad muscular necesaria para alcanzar el objetivo deseado.
Este mecanismo posee enorme importancia biomecánica debido a que el cuerpo humano está sometido continuamente a fuerzas de inercia, elasticidad muscular y gravedad. Cualquier movimiento genera momentum, y si no existieran sistemas predictivos de amortiguación, las extremidades oscilarían repetidamente alrededor del objetivo deseado. El cerebelo actúa precisamente como un sistema de amortiguación fisiológica capaz de detener el movimiento exactamente en el punto requerido, evitando sobrepasamientos y oscilaciones. Cuando el cerebelo se lesiona, aparecen temblores de intención y movimientos atáxicos porque el sistema nervioso pierde la capacidad de predecir adecuadamente las consecuencias dinámicas de la acción motora.
La característica más notable del control anterógrado es que no depende inicialmente de información de error inmediata. El sistema ejecuta el movimiento basándose en predicciones previas. Sin embargo, una vez concluido el movimiento, las aferencias sensitivas provenientes de husos musculares, órganos tendinosos de Golgi, receptores articulares y sistemas visuales permiten comparar el resultado real con el resultado esperado. Esta comparación constituye el fundamento del control adaptativo.
El control adaptativo puede entenderse como un mecanismo de aprendizaje correctivo mediante el cual el sistema nervioso modifica progresivamente sus señales anterógradas basándose en errores previos de ejecución. A diferencia de la retroalimentación negativa clásica, donde la corrección ocurre casi inmediatamente después de detectar el error, en el control adaptativo la corrección suele aplicarse en intentos posteriores. Por ello, se considera una forma de retroalimentación negativa retardada.
Este proceso es esencial porque las condiciones biomecánicas del organismo cambian constantemente. El peso de un objeto puede variar, la fatiga muscular modifica las propiedades de contracción, el crecimiento corporal altera las proporciones anatómicas y las condiciones externas pueden cambiar de forma impredecible. Si el sistema nervioso utilizara programas motores rígidos e invariables, el desempeño motor sería rápidamente ineficaz. El control adaptativo permite actualizar continuamente dichos programas mediante plasticidad sináptica y reorganización neuronal.
El cerebelo desempeña nuevamente un papel central en este fenómeno. Las fibras trepadoras procedentes del complejo olivar inferior transmiten señales de error hacia las células de Purkinje cerebelosas cuando existe discrepancia entre el movimiento esperado y el ejecutado. Estas señales inducen modificaciones sinápticas duraderas, especialmente depresión a largo plazo en las sinapsis paralelas-Purkinje, alterando la respuesta futura de los circuitos cerebelosos. Gracias a este mecanismo, los movimientos posteriores se vuelven más precisos. El sistema literalmente “aprende de sus errores”.
La importancia funcional del control adaptativo puede observarse claramente en el aprendizaje motor. Cuando una persona aprende a montar bicicleta, utilizar herramientas nuevas o practicar un deporte, inicialmente los movimientos son imprecisos y torpes. Cada error proporciona información sensorial que el sistema nervioso utiliza para recalibrar sus modelos internos. Después de numerosas repeticiones, las órdenes motoras anticipatorias se ajustan con tal precisión que la actividad puede ejecutarse de manera automática y extremadamente rápida.
Además de su relevancia biológica, estos principios han inspirado numerosos desarrollos en ingeniería biomédica y robótica. Los sistemas modernos de control adaptativo en robots imitan el funcionamiento cerebeloso mediante algoritmos capaces de modificar dinámicamente parámetros de movimiento según errores previos. Los modelos computacionales basados en el cerebelo han demostrado que la combinación de control anterógrado y aprendizaje adaptativo permite mejorar considerablemente la precisión y estabilidad de sistemas motores artificiales complejos.
El control anterógrado y el control adaptativo representan una solución evolutiva al problema fundamental del retraso temporal en los sistemas biológicos. Ningún sistema nervioso puede eliminar completamente los tiempos de conducción neuronal, pero sí puede compensarlos mediante predicción y aprendizaje. El encéfalo utiliza experiencias previas para anticipar eventos futuros y luego corrige progresivamente sus predicciones según los errores observados. Esta capacidad convierte al sistema nervioso humano en un sistema dinámico, plástico y altamente eficiente, capaz de ejecutar movimientos extraordinariamente complejos con rapidez y precisión.

Fuente y lecturas recomendadas:
- Eccles, J. C., Ito, M., & Szentágothai, J. (1967). The cerebellum as a neuronal machine. Springer.
- Guyton, A. C., & Hall, J. E. (2021). Tratado de fisiología médica (14.ª ed.). Elsevier.
- Herreros-Alonso, I., Arsiwalla, X. D., & Verschure, P. F. M. J. (2017). A forward model at Purkinje cell synapses facilitates cerebellar anticipatory control. arXiv. https://arxiv.org/abs/1701.07775
- Herreros, I., Arsiwalla, X. D., Della Santina, C., Puigbo, J. Y., Bicchi, A., & Verschure, P. (2017). Cerebellar-inspired learning rule for gain adaptation of feedback controllers. arXiv. https://arxiv.org/abs/1707.01484
- Nguyen, K. P., & Person, A. L. (2025). Cerebellar circuit computations for predictive motor control. Nature Reviews Neuroscience, 26(7), 538–553.
- Verduzco-Flores, S., & De Schutter, E. (2021). Self-configuring feedback loops for sensorimotor control. arXiv. https://arxiv.org/abs/2109.07778
- Abadia, I., Naveros, F., Garrido, J. A., Ros, E., & Luque, N. R. (2020). On robot compliance: A cerebellar control approach. arXiv. https://arxiv.org/abs/2003.01033
Aprende administración paso a paso

ADMINISTRACION DESDE CERO

